Re: Intento de desarrollo posicionador diseqc de codigo abierto
Publicado: 12 May 2019 21:52
El foro argentino de la TV libre
https://ftatv.com.ar/foro/
No te calientes mucho por esta característica, dado que si las diferencias no son muchas solo ahorras un poco en el disipador dado que este calentara menos, el transistor debe estar de acuerdo a la potencia a manejar y el de menor precio es el que hay que utilizar.
Muchas veces el ruido ingresa por la alimentación, por lo que es importante poner capacitores a masa para que por ellos se valla el ruido. se suele poner uno electrolítico de 12uF en paralelo con uno de .1; también pequeños choques o circuitos resonantes en las distintas patas de los integrados y/o capacitores como los comentados ayudan a eliminar el ruido. Lamentablemente donde colocarlos es un proceso de prueba y error.
Tengo que probar con algun inductor en la fuente, por ahora solo conecte el arduino por usb y la alimentacion de los relees y el motor por separado.Alf escribió: ↑18 May 2019 10:59 Hola
No te calientes mucho por esta característica, dado que si las diferencias no son muchas solo ahorras un poco en el disipador dado que este calentara menos, el transistor debe estar de acuerdo a la potencia a manejar y el de menor precio es el que hay que utilizar.
Muchas veces el ruido ingresa por la alimentación, por lo que es importante poner capacitores a masa para que por ellos se valla el ruido. se suele poner uno electrolítico de 12uF en paralelo con uno de .1; también pequeños choques o circuitos resonantes en las distintas patas de los integrados y/o capacitores como los comentados ayudan a eliminar el ruido. Lamentablemente donde colocarlos es un proceso de prueba y error.
Saludos
¿Estas diciendo que aunque no haya movimiento del motor produce conteo de giro de este? Si ese es el caso ya pensaría en reformular el sistema de conteo.rodrigocn escribió: ↑18 May 2019 17:55 Tengo que probar con algun inductor en la fuente, por ahora solo conecte el arduino por usb y la alimentacion de los relees y el motor por separado.
Es tan sensible, que si activo el conteo de pulsos, sin tener motor conectado y presiono el boton azul de arriba de los relees (lo que hace es accionarlo mecanicamente) cuenta pulsos osea solo con invertir la polaridad (teniendo el mosfet sin gatillar) ya detecta alguna interferencia...
Descartalos ya, utiliza cable UTP 5e, son baratos y fáciles de conseguir. Yo utilizo estos, eso si con vaina para exterior; para tus pruebas conseguí los comunes, no gastes dinero de más.
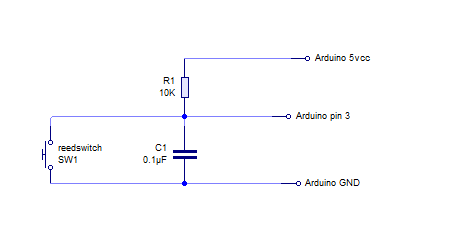
Pone todo (completo, sin que falte ningún componente) el circuito de conteo (el diagrama) tal vez pueda ver donde esta el problema o dar alguna idea.
Código: Seleccionar todo
void moverMotor1Este() {
if (moviendoMotor1 == false) {
moviendoMotor1 = true;
//primero cambia sentido giro
digitalWriteFast(motor1Sentido, LOW);
delay(2000); //espero 2 segundos, para que se "estabilice"
attachInterrupt(digitalPinToInterrupt(reedSwitch1),restarPulsosM1, CHANGE); //empieza conteo de pulsos,en este caso, resta 1 pulso en cada cambio de estado
digitalWriteFast(motor1PWR, HIGH); //activa motor
}
}
Código: Seleccionar todo
void restarPulsosM1() {
motor1PulsosActuales = motor1PulsosActuales - 1;
if ((motor1PulsosActuales == motor1PulsosDestino)) {
pararMotor1();
}
}
Código: Seleccionar todo
void pararMotor1() {
digitalWriteFast(motor1PWR, LOW); //apaga el motor
detachInterrupt(digitalPinToInterrupt(reedSwitch1)); //desacriva la interrupcion, no cuenta mas pulsos
moviendoMotor1 = false;
}

